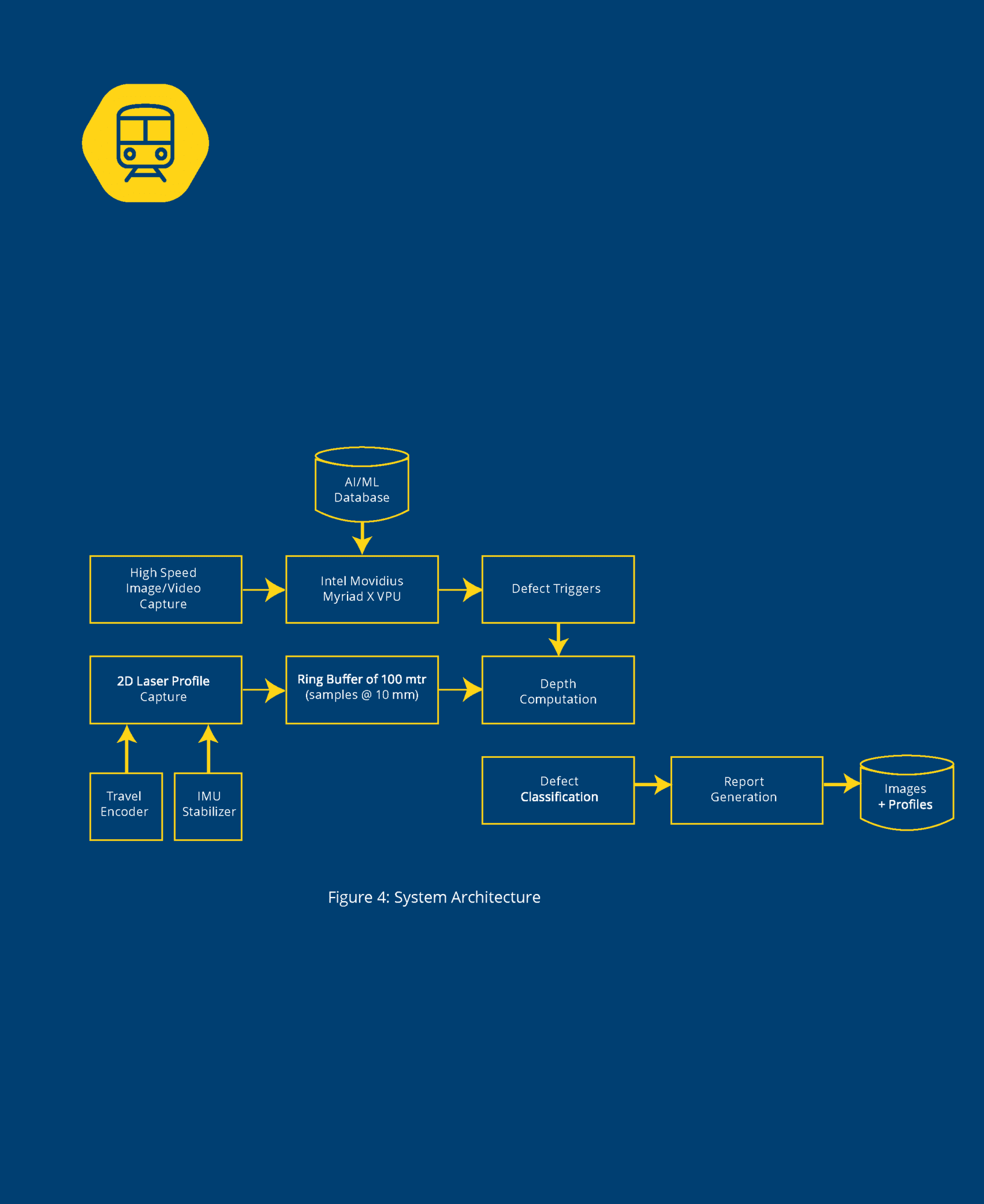
To summarize, the brilliant “closed loop feedback system” constituting of machine vision defect analysis and the 3D laser depth profile analysis results in a reliable and accurate defect recognition and classification.
The main challenge in this dataset is the illumination from sunlight at the peak hours. To make the model robust and to enhance the dataset, some image processing techniques were implemented on the dataset. As the dataset was completely new, annotations for that dataset were also created. This was the most difficult part of the entire project because it consumed more time than even the model training.
For this project, two separate approaches were implemented. One was object detection by YOLOv3 and other was segmentation model by Unet. Previously, only object detection approach was to be implemented. But after performing literature survey, it was observed that segmentation model must also be implemented for higher accuracy. So, in order to find a better deep learning approach, both approaches were implemented and compared.
After the model was trained to build a deep learnt neural network model, the performance evaluation on a computer workstation was done. Intel Open-Vino toolkit was explored for object detection model optimization. The computer workstation was equipped Intel Movidius Multi-VPU card. Intel Open-Vino toolkit was used to get an optimized performing model for any AI inference.