Sandip G Patel, Engineer | Transportation verticalAtulchandra Tripathi | Joint General Manager, Transportation vertical
Model-Based System Engineering Approach to the Design of an Electric Power Steering System for Automotive Applications
Abstract
02
Introduction
03
Mathematical model of column assists EPS
05
Modeling of EPS Characteristic Curves and steering ECU
07
Modeling EPS system in MATLAB/Simulink
08
Result of EPS System
09
Conclusions
12
About L&T Technology Services
13
Automotive systems have become more complex over recent years because of the continuous development in technology. Hence, it is also becoming difficult to specify and validate the system and software requirements for such large and complex systems. To overcome this problem, automotive designers urgently need to apply Model-Based Systems Engineering (MBSE) theory and methods into the field of automobiles to support the requirements, design, analysis, verification, and validation of such complex systems.The steering system of an automobile helps to steer the vehicle and conveys information about the road and the vehicle to the driver. The Electric Power Steering (EPS) system is popular in the automotive system and uses electric power from the battery to steer the vehicle. In EPS, The Permanent Magnet Synchronous Motor (PMSM) is provided on the steering column to provide the assist torque for steering the vehicle. In the Electronic Control Unit (ECU) the control logic was implemented. This logic is considering the input sensing torque from the steering wheel and the velocity of the vehicle. Depending on these two inputs, a certain amount of assisting torque is applied based on the linear and nonlinear pattern assistant characteristic (Booster Curve).The fidelity of the model was tested against the various maneuvers like the frequency sweep maneuver, double lane-change maneuver, swept sine maneuver, on-center maneuver, etc. as per the various standards (ISO 4138:2012, ISO 888-2:2011, and SAE J266_199601). The results obtained in different scenarios applied in the simulation illustrate the effectiveness and robustness of the developed EPS model.Keywords: Model based systems engineering, Electric power steering system, Permanent magnet synchronous motor, Electronic control unit, Assisting torque, Booster Curve, Manoeuvres.
Many automotive systems have safety-critical elements, redundancy, and an increasingly high level of interaction. It has become difficult to specify and validate the requirements for these systems, particularly when the systems may be developed by different suppliers. For a complex system, it can be difficult to trace these dependencies, with design updates being manually propagated through related documents and being prone to error. Furthermore, text-based requirements can be ambiguous, leading to misinterpretation and are not a suitable format for use in a formal verification and testing process. Adopting model-based design processes and associated methods can help to address many of these issues as part of the system development process. Hence, a novel MBSE approach is used for developing the steering system of the automobile.The steering system acts as one of the important components of a vehicle because it helps steer the vehicle and conveys information about the road and the vehicle to the driver. In the car, front-wheel drive reduces weight, decreases production costs, and improves fuel economy compared to a rear-wheel-drive system. It also improves traction since the weight of the engine and transmission acts on the driven wheels. To reduce the physical effort of drivers, car manufacturers introduced various types of steering systems based on the power source. These systems are divided mainly into two categories: hydraulic and electric power steering systems.
The Hydraulic Power Steering (HPS) system uses hydraulic pressure supplied from an engine-driven pump to assist the driver in turning the steering wheel. On the other hand, an electric power steering (EPS) system generates steering assistance using an electric motor to make steering more comfortable for drivers. EPS systems compared to HPS systems offer lower energy consumption, lower total weight, and package flexibility, at no cost penalty. In addition, with the increase in fuel prices, the fuel-saving benefits of EPS systems make these products more economical than HPS systems. In electric and hybrid vehicles, the engine does not run continuously, so electric power steering is the only possible solution. Furthermore, EPS systems can generate assistance independent of the vehicle's driving condition; therefore, new control strategies can be implemented to improve the steering feel and safety of the vehicle simultaneously.
Fig. 1. Schematic diagram of a column-type EPS system
Nowadays, there are different types of EPS systems available on the market, which are used according to the vehicle's boundary conditions and the vehicle manufacturer's technological philosophy. Among them all, column-assist type EPS systems (as shown in Figure 1) are the most widely used in automotive.Here, an MBSE-based approach is used for mathematical modelling of the electric power steering system. The PMSM is used as a motor in the column-assist EPS system. The mechanical system of the EPS is based on the dynamical model. These dynamical equations of motion describe the entire system, from the steering wheel to the pinion that steers the wheel. The ECU contains the control logic for the EPS. The assisted steering torque needed to be developed by the assistance motor is calculated based on the steering wheel input torque and the vehicle speed.
A clear understanding of the system requirements and dynamics of a system is crucial in designing control systems since it not only strengthens our knowledge of the system but also reduces development time and cost. The input torque from the steering wheel is measured by a torque sensor mounted on the steering column and connected to the electronic control unit. The assistance torque produced by the motor acts on the wheel via the rack and pinion system. A different amount of assistance torque is applied depending on the driving conditions, which is realised with a specific control logic implemented in the ECU.The dynamic equations from the steering wheel to the steering column are:
The assistant section is described by the following equation:
The rack and pinion section are governed by the equation:
Where 𝐽𝑠, 𝐽𝑟, and 𝐽𝑚 are the inertias of the steering wheel, retarding mechanism, and assist motor. 𝜃𝑠, 𝜃𝑟,, and 𝜃𝑚 are the rotation angles of the steering wheel, steering column, and assist motor. 𝐾𝑠, 𝐾𝑚 are the stiffness coefficients of the steering column and assist motor. 𝐵𝑠, 𝐵𝑚 and 𝐵𝑟 are the damping coefficients of the steering wheel, assist motor, and retarding mechanism (Rack and Pinion). 𝑇𝑑, 𝑇𝑚 is the torque acting on the steering wheel and torque generated by the assist motor. 𝐾𝑟 is the stiffness coefficient of an equivalent spring, 𝑋𝑟 is rack displacement, 𝑟𝑝 is the reduction ratio of the worm gear reducer, 𝐵𝑟 is the damping coefficient of rack and pinion.
The power steering system is aimed at controlling the target current of the assisting motor. Different types of electrical motors are used for the EPS. They are divided into two main categories: brushed DC motors and permanent magnet brushless motors. According to the back-EMF, the permanent magnet brushless motors can be divided into brushless DC motors (BLDC) driven by a square wave and permanent magnet synchronous motors (PMSM) driven by a sin wave. When comparing these types of motors with the same capacity, the PMSM is smaller, lighter, and has lower rotary inertia, which makes it suitable for high torque response and high-performance requirements from the EPS.
Where 𝑢𝑑, 𝑢𝑞, 𝑖𝑑 and 𝑖𝑞 are the stator winding voltages and currents in d-q axis. 𝐿𝑑, 𝐿𝑞 and 𝑅𝑠 are the inductances and resistance of the stator. 𝜔 is the motor’s angular speed. 𝜆𝑝𝑚 represents the permanent magnet flux and 𝑝 the number of pole-pairs in the mechanical equation.
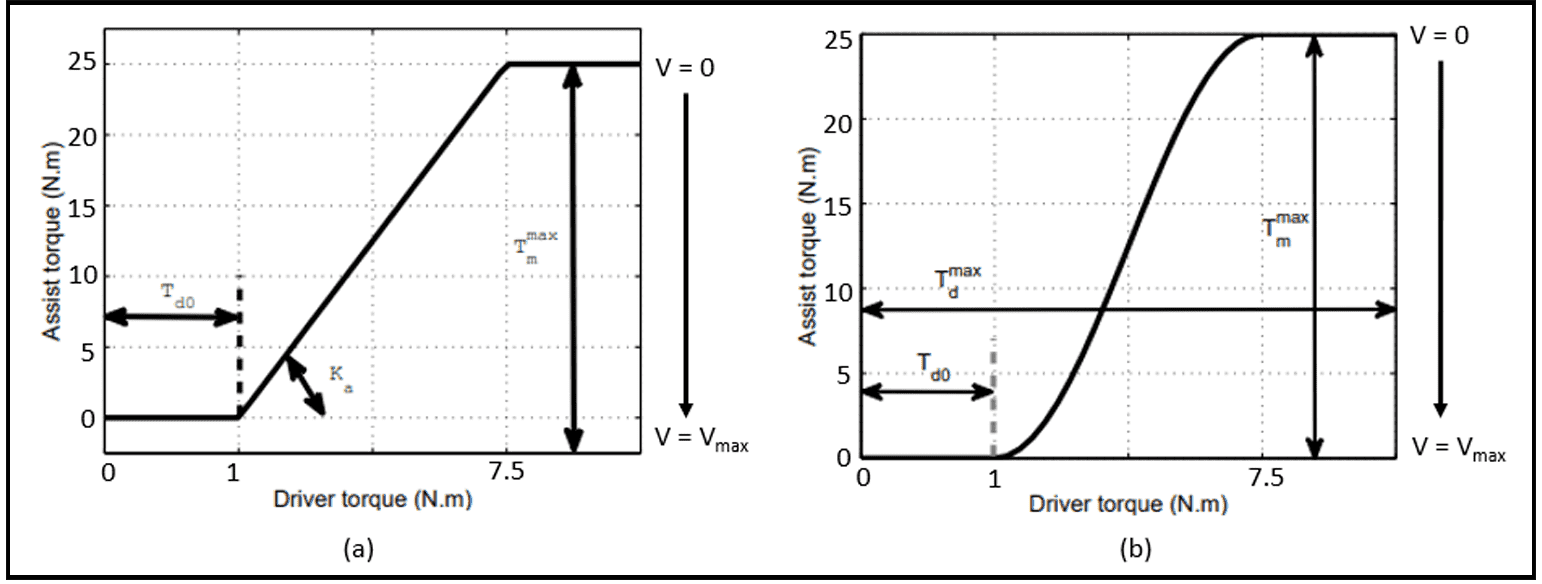
The steering characteristic curves are a linear, non-linear, or multi-linear function of the driver's steering torque at different vehicle speeds. A low-order linear model is more desirable than a high-order nonlinear model because it reduces the computational time while conveying the important dynamics of the high-fidelity plant model. Therefore, a linear vehicle model including a column-assist EPS system is used to design an EPS characteristics curve. Since the EPS controller will be designed to track a desired assist-torque based on the EPS characteristic curves, the dynamics of the electric motor and reduction gear are neglected here, and it is assumed that the assist torque is directly applied at the steering column.Fig. 2a and 2b show a steering characteristic curve (at a specific vehicle speed), which is a linear and non-linear function of the driver torque. This characteristic curve, or so-called linear and nonlinear EPS characteristic curve, consists of an unassisted zone to avoid the off-center feeling.
The threshold is set at 1 Nm. If the steering wheel input torque is less than the threshold, the steering of the vehicle is not assisted, and a good road feel is ensured. If the steering wheel torque is higher than the (maximum threshold = 7.5 Nm), the assistance motor will deliver its rated torque, in this case, 24 Nm. If the input torque is between 1 and 7.5 Nm, depending on the vehicle speed, the assistance torque is calculated.
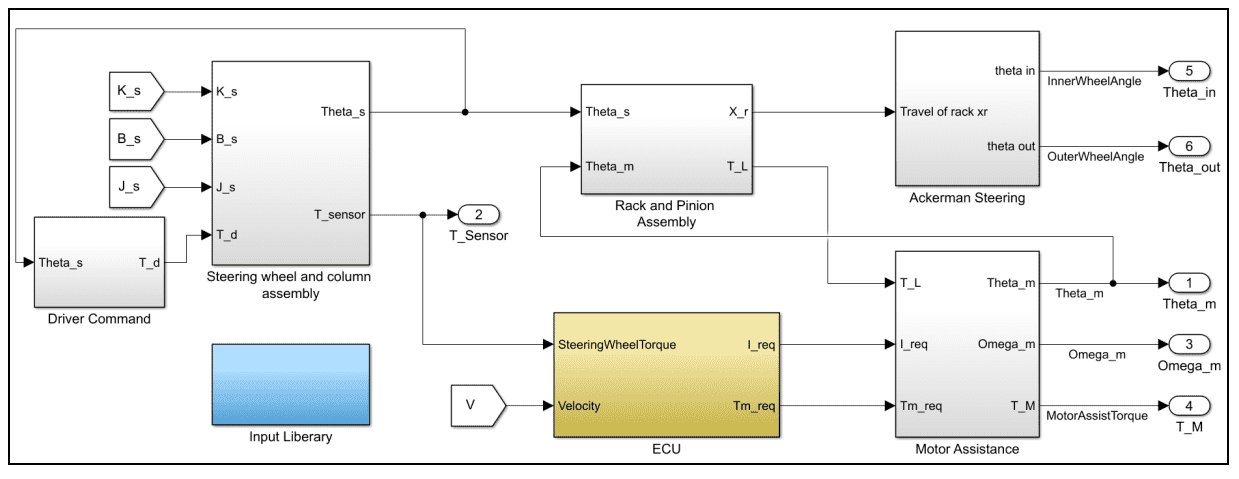
The modelling of the column assist electric power steering system is presented in Fig. 3. The driver model, mechanical system, ECU, torque controller, Ackerman steering, and PMSM motor are implemented in MATLAB/Simulink. The model fidelity was tasted against the various maneuvers like the frequency sweep maneuver, double lane change maneuver, swept sine maneuver, on-center maneuver, etc. as per the various ISO & SAE standards.
Fig. 3. Modeling of the column-assist electric power steering system
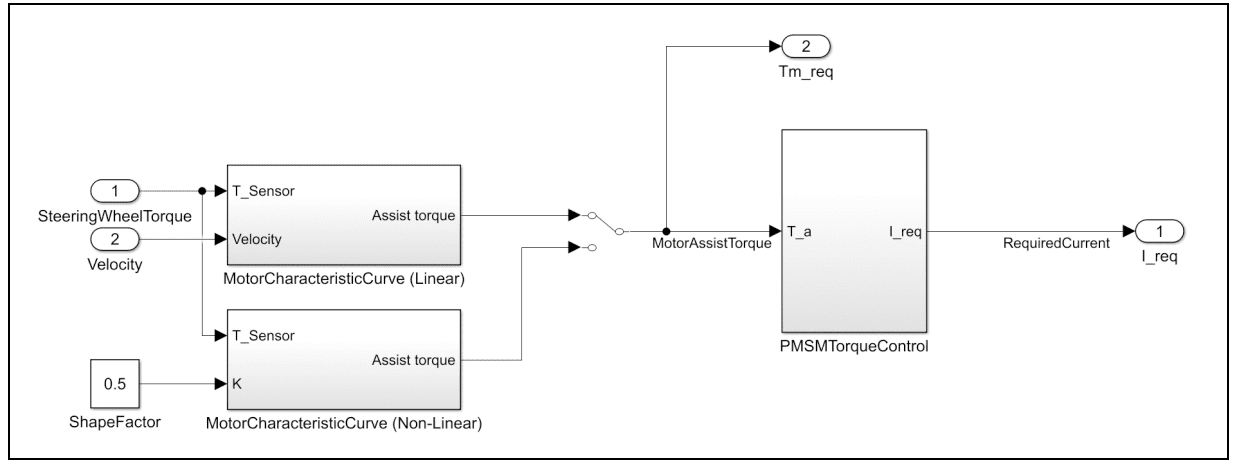
The EPS system is implemented using the dynamic equations (1) to (6). The Simulink implementation can be seen in Fig. 3. The driver's sense of torque and vehicle velocity are the inputs to the ECU. The ECU defines the required torque based on the pre-established characteristic curves (Booster Curve) and evaluates the required current from that. Then, this current is further used by PMSM for evaluating the assist torque. The detailed modelling of the ECU is shown in Fig. 4.
Fig. 4. Modeling of the column-assist electric power steering system ECU
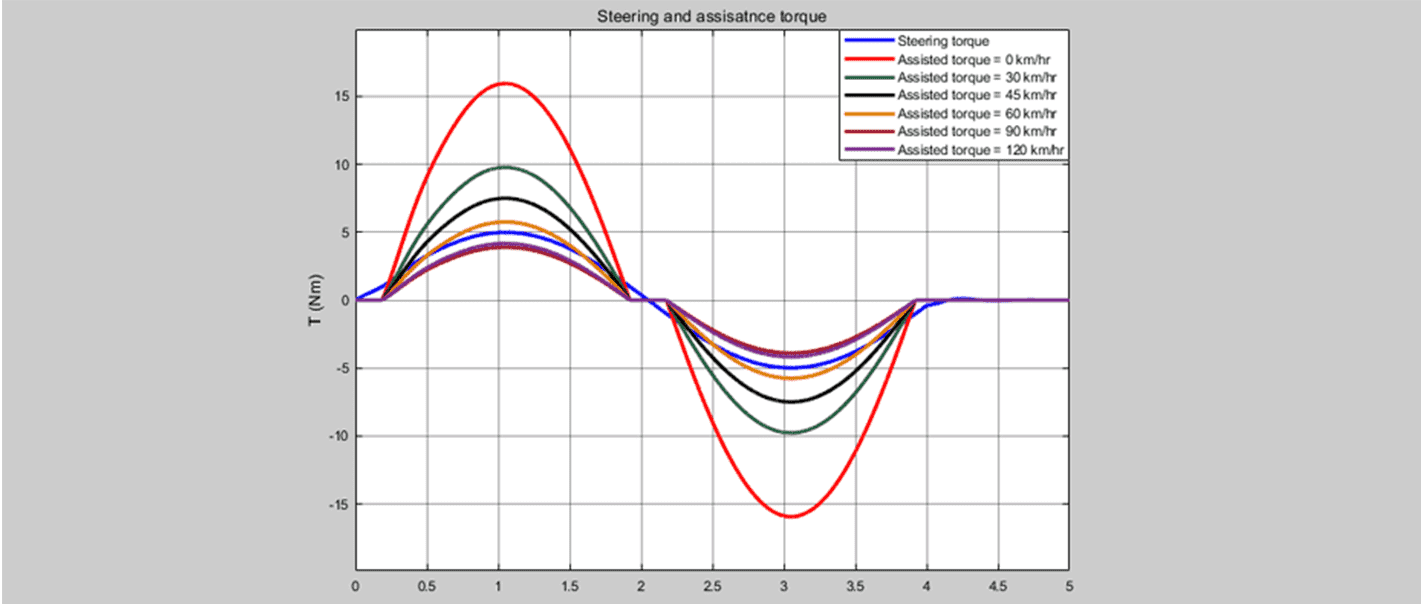
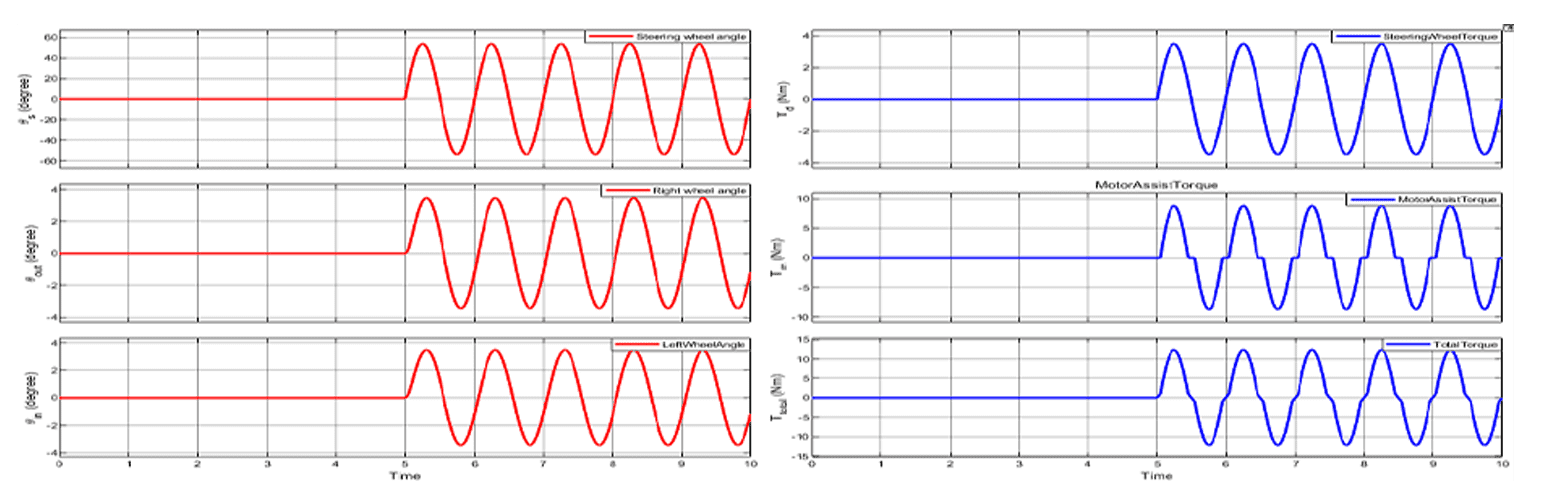
The simulations are performed on the real-time processor based on imposing different steering torque inputs. In the first simulation, a periodical sinusoidal variation of the steering torque was applied for a complete period of 5s. The amplitude of the sinusoidal wave is 5 Nm. The speed of the vehicle was varied from 0 to 120 km/h (0, 30, 45, 60, 90, 120 km/h). By varying the vehicle speed, different assistance torques are needed to steer the vehicle. The results of this simulation are represented in Figure 5. The assistance torque is applied only if the input torque from the steering wheel is higher than the minimum threshold value.
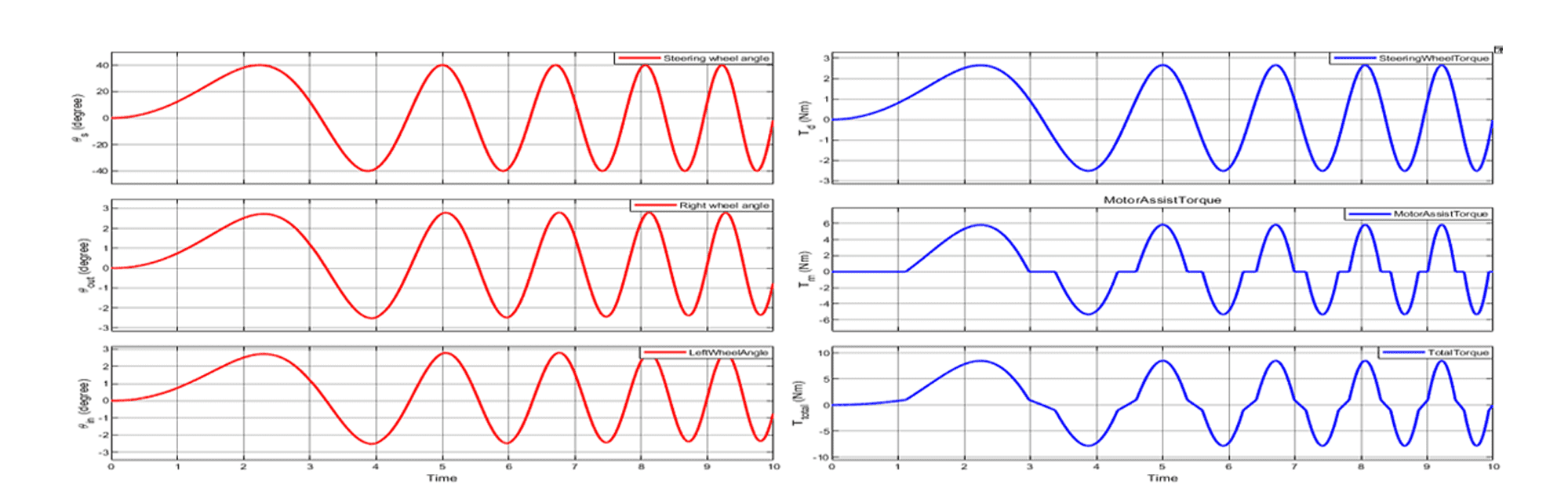
Next, the fidelity of the model is tasted against various steering standards manoeuvres like the frequency sweep manoeuvre, double lane change manoeuvre, swept sine manoeuvre, and on-centre manoeuvre etc. as per the various standards (ISO 4138:2012, ISO 3888-2:2011, and SAE J266_199601). The results of all manoeuvres are depicted at 30 km/hr in Fig. 6-9.
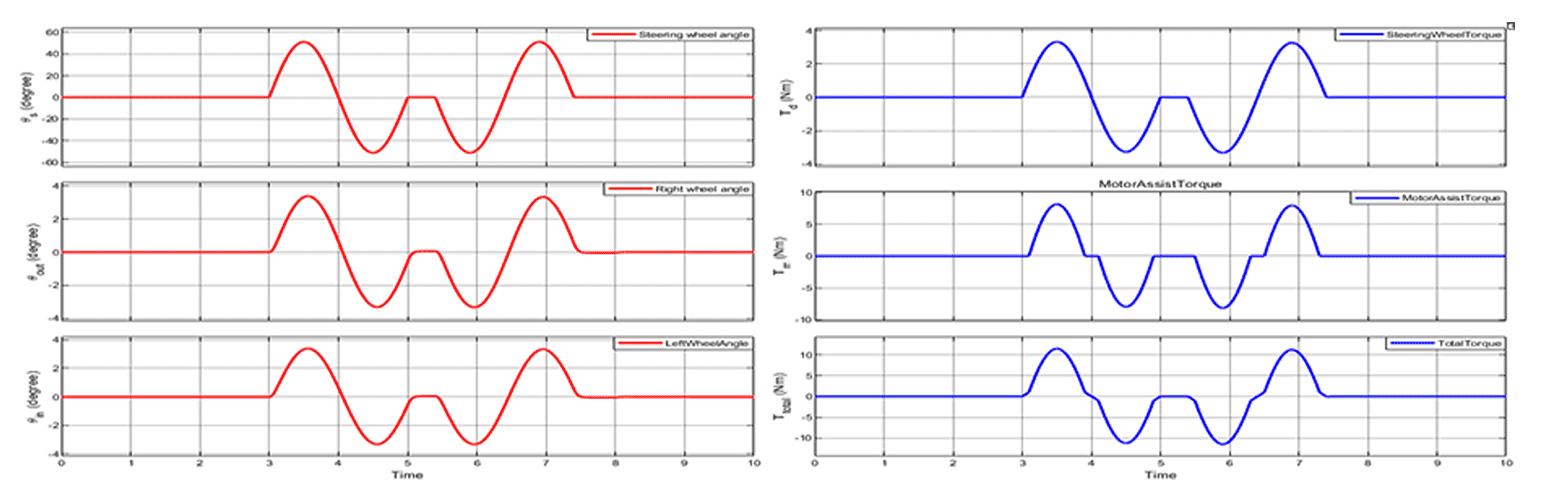
Fig. 7. EPAS characteristics for Double lane change manoeuvre
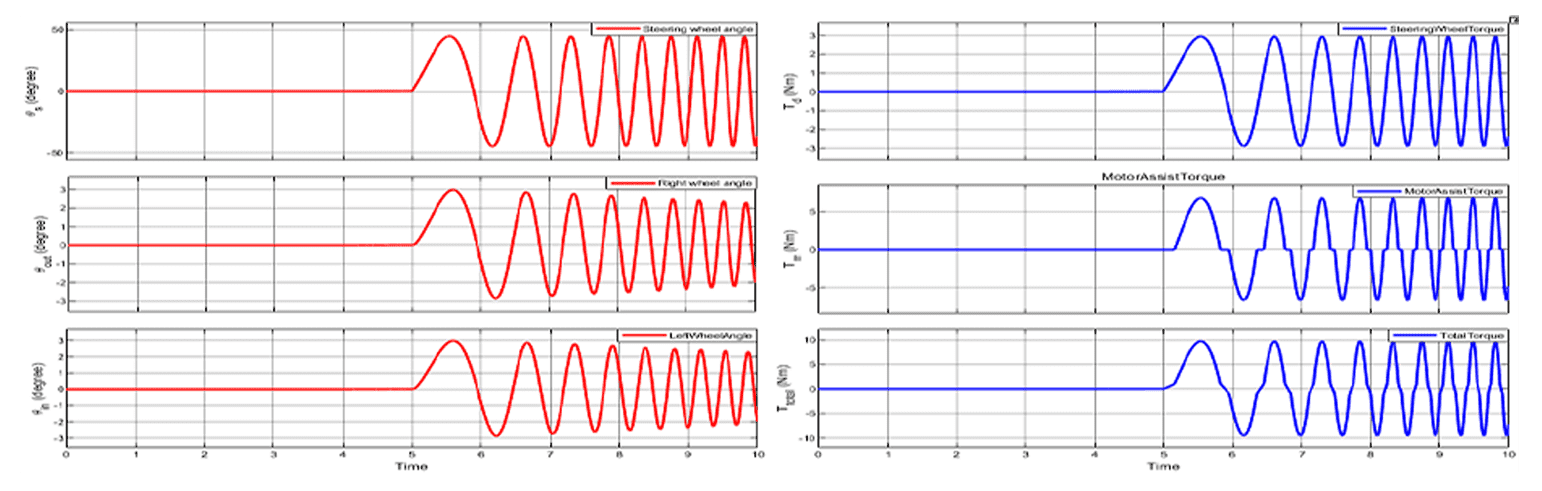
Fig. 8. EPAS characteristics for Swept sine manoeuvre
Fig. 9. EPAS characteristics for On-centre manoeuvre
Model-based systems engineering (MBSE) is an engineering methodology that focuses on requirements, design, analysis, verification, and validation by keeping the product or system at the centre and representing the logical behaviour of the system in the form of physics-based equations. A complete electric power steering system was designed using the MBSE approach in MATLAB/Simulink. The complete system was tested and validated on a different standard manoeuvre to meet the requirements. The results obtained in different scenarios applied in the simulation illustrate the effectiveness and robustness of the developed EPS.
L&T Technology Services Limited (LTTS) is a global leader in Engineering and R&D (ER&D) services. With 502 patents filed for 51 of the Global Top 100 ER&D spenders. Our innovations speak for itself – World’s 1st Autonomous Welding Robot, Solar ‘Connectivity’ Drone, and the Smartest Campus in the World, to name a few. LTTS expertise in engineering design, product development, smart manufacturing, and digitalization touches every area of our lives. With 49 Innovation and R&D design centres globally, we specialize in disruptive technology spaces such as 5G, Artificial Intelligence, Collaborative Robots, Digital Factory, and Autonomous Transport. LTTS is a publicly listed subsidiary of Larsen & Toubro Limited, the $21 billion Indian conglomerate operating in over 30 countries.